UltraTips 167
Calibración del Enconder en el Phasor XS
Procedimiento
INTRODUCCION:
En esta ocasión les hablaremos de la calibración del encoder en un sistema de inspección por arreglo de fase. El encoder es un dispositivo rotativo que transforma un movimiento lineal en una serie de impulsos digitales. Estos impulsos generados pueden ser utilizados para controlar los desplazamientos de tipo lineal.
En esta ocasión les hablaremos de la calibración del encoder en un sistema de inspección por arreglo de fase. El encoder es un dispositivo rotativo que transforma un movimiento lineal en una serie de impulsos digitales. Estos impulsos generados pueden ser utilizados para controlar los desplazamientos de tipo lineal.

El encoder se caracteriza porque determina su posición, contando el número de impulsos que se generan cuando un rayo de luz, es atravesado por marcas opacas en la superficie de un disco unido al eje.
En arreglo de fase se generan una cantidad de aces de ultrasonido debido a que la apertura de ángulos cubren el total de la soldadura, esto representa que para obtener la dimensión longitudinal de una discontinuidad es necesario mover el transductor paralelo al eje de la soldadura.

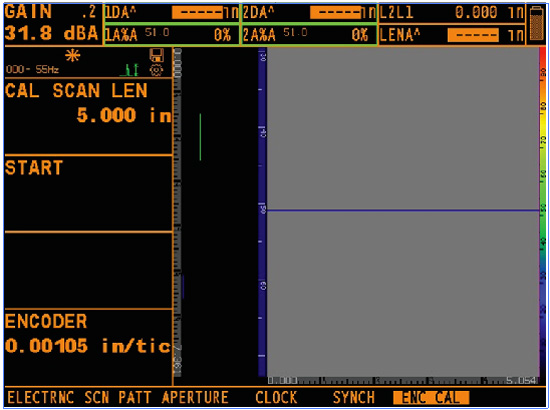
La calibración del encoder es un factor primordial para establecer la dimensión correcta de las discontinuidades. A continuación se menciona la forma de calibración del mismo.
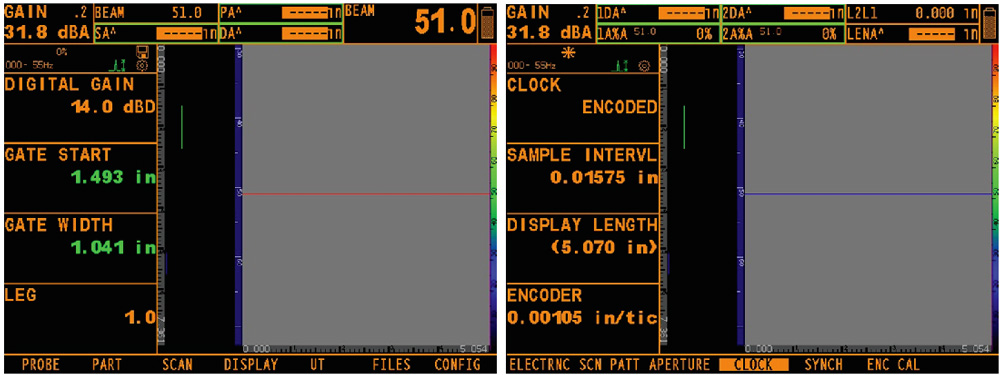
1.- Ingresamos en el menú principal en SCAN y presionamos en la opción CLOCK. Ajustamos la longitud de la pantalla
con la función SAMPLE INTERVL (Por ejemplo a 5" aproximadamente).
Conclusión
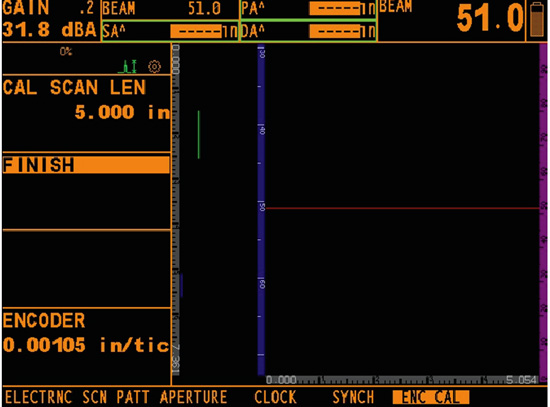
Podemos comprobar que la calibración del encoder se ha realizado limpiando la pantalla y desplazando el encoder en una distancia determinada que debe corresponder a la información que muestra el equipo en la pantalla y debe coincidir con el recorrido.
Podemos comprobar que la calibración del encoder se ha realizado limpiando la pantalla y desplazando el encoder en una distancia determinada que debe corresponder a la información que muestra el equipo en la pantalla y debe coincidir con el recorrido.
